
Theory-crafting: Predicting Aircraft Maneuvering Fuel Consumption to achieve a more sustainable ATM.
Antonio Fernandez
Aircraft fuel consumption and carbon footprint are the main concerns in the aviation industry today. In its current form, airspace has wide room for improvement from an environmental point of view. In the same way indicators such as operational impact, aircraft short-to-long term conflict prevention, letters of agreement or complexity are taken into account when instructing aircraft maneuvers, the fuel consumed by the instructions given must be considered equally or even with higher priority. However, air traffic management procedures are way too complex to adapt rapidly to this requirement. The development of data-driven solutions could overcome this global concern and support this paradigm shift, though data on flights fuel consumption and radar trajectories are quite limited, which complicates a lot its implementation, experimentation and research.
The Problem
In this post we are going to discuss about the environmental impact and eco-footprints attached to particular trajectory segments and maneuvers. In other words, we’ll theorycraft how fuel predictions could be given during the tactical phase, when the flight is already being operated and the executive controller wants to have an indicator that shows fuel consumption per aircraft maneuver. Some research questions to answer with this approach would be: what would be the (fuel) cost of instructing a vectorization to flight IB1234-A320? Or similarly, what would be the (fuel) cost of instructing a climb/descend to the same flight? or, what would be the (fuel) cost of accepting a direct request from the pilot of the same flight to a particular waypoint?
The Data
During the tactical phase, air traffic controllers (ATCOs) use radar antennae to control a certain airspace or sector. In our case and due to simplicity and better accessibility, we can use surveillance radar data (ADS-B) as the main data source. Although not all flights have to emit ADS-B signals, and some may have shadow regions out of coverage, more than 95% of aircraft will be equipped with ADS-B by the end of 2023 according to SESAR Deployment Manager. The most relevant information provided by ADS-B normally includes latitude, longitude, altitude, track angle and ground speed, and also the callsign and tail number, among other constant values.
At this point you may be asking yourself, how can we obtain our target variable, which is the fuel consumption, by using these variables? Indeed, we can only use ADS-B for the feature engineering that inputs to the model, so we must extract fuel from other sources not available at the prediction time. Ideally, we would use Flight Data Monitoring (FDM) data, which contains almost any parameter that can be recorded within the aircraft, including the fuel. Moreover, it’s very precise, providing up to eight measures per second for certain sensors. This data source is owned by airlines safety departments and is available once the aircraft has landed.
Through this data, we can match FDM with ADS-B positions to know the actual fuel consumed between the trajectory points, though this merge process isn’t always as straightforward due to unique flight identification and other concerns. On the other hand, we could use BADA from EUROCONTROL (ref) as an estimation of fuel consumption; however actual fuel measurements always make use cases more realistic and attractive when compared to estimations, and as such this accuracy could be an incentive for airlines and air navigation service providers (ANSPs) to cooperate and share data.
Some features that may enhance the prediction would be weather, and more concisely wind measurements around aircraft since this heavily impacts fuel consumption. We can support our predictions with ADS-B Mode-S measures (temperature, pressure, wind direction and wind speed), or use probabilistic models or weather forecasts.
The Model
Once data has been cleaned and prepared (quite a thorough task), we are ready for modeling part. The first step is to compose the training set. We can identify aircraft maneuvers in ADS-B data by examining the whole trajectory, which might be a bit challenging at glance. Theoretically, each maneuver is always triggered by an ATC instruction. This instruction can be either derived from the flight plan or executed to solve a potential conflict, so we can set up some criteria to determine when an instruction is beginning or ending, and flag these segments along the route. It’s possible to directly label instructions using external data sources such as CPDLC messages or even VHF speech transcriptions, but, due to these sources’ low availability, this approach is a bit out of scope.
The second step would be to label the level of fuel consumption of each of the maneuver segments that have been already identified. For this we have to merge past FDM data with ADS-B, and synchronize both data sources to compute the amount of fuel burnt along the period of interest.
Finally, we are ready to train the model. For this theorycrafting, we selected Temporal Convolutional Neural Network as a deep learning model worth trying, but many other models can solve this kind of problem. TCN is an emerging deep learning algorithm that has been proved to work very well in a wide variety of scenarios such as traffic prediction, sound event localization or probabilistic forecasting among others. Without going into many details about how TCN model works, it enables capture of all two levels of information hierarchically, both low and high level features. Conventionally, it has been done by combining CNNs and RNNs into a single unified model, however, TCN exhibits a longer memory than recurrent architectures with the same capacity, performing better than LSTM/GRU.
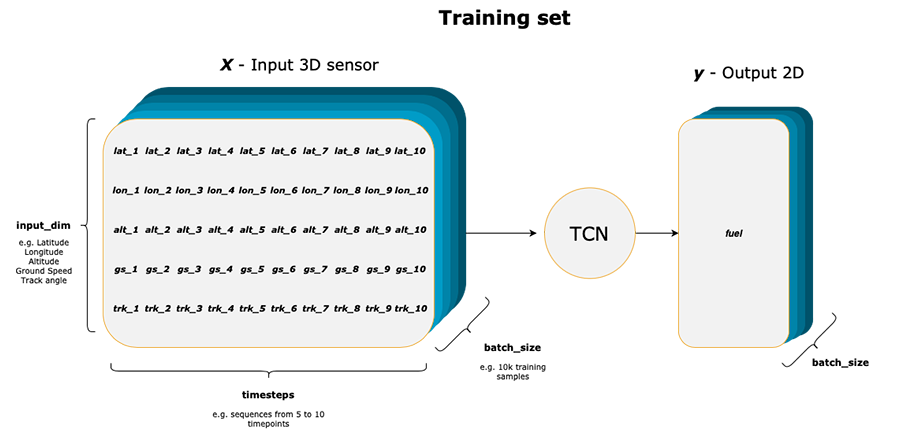
Regarding the model inputs and outputs, we would have to input a 3D tensor with shape (batch_size, timesteps, input_dim), and, for our fuel prediction problem, output would be a number representing the fuel consumed. Thus the machine learning problem that we aim to solve is a many-to-one regression We were inspired by the adding problem example recommended in TCN github repository (ref), where inputs are a length-T sequence of depth 2, with a series of numbers to sum, and another series with binary values expressing which must be added.
In our scenario, trajectory segments length might be different depending on how long it takes the aircraft to maneuver. Since timesteps can be None, it can be useful if each sequence is of a different length. The dimension of our 3D input tensor would be:
- batch_size: the number of maneuvers that we have in our training set (e.g. 10.000 maneuvers identified among different aircraft types and airlines)
- timesteps: the length of each maneuver sequence of points (e.g. up to 10 points maximum, assuming that in ADS-B we have 1 sample every 30 seconds)
- input_dim: the number of features that contribute to fuel consumption at the prediction time (e.g. 5 – latitude, longitude, altitude, ground speed and track).
Similarly to the adding problem example, our output would be a number representing fuel consumption rather than numbers addition. The output for the training set would be a 2D vector with shape (batch_size, 1). In Figure X, we have depicted such a model training set.
Conclusion
In this post, we theorycrafted a suitable case study that might improve the ecological footprint of ATC aircraft maneuvers. We assumed certain aspects such as data availability or its ease of integration; however, we managed to propose a way to train a state-of-the-art deep learning model that could perfectly satisfy the case study needs.
References
https://github.com/Baichenjia/Tensorflow-TCN/tree/master/adding_problem


